Elemento de Aislador Elastomerico (Bouc Wen) - isolator 1
Los elementos de tipo isolator1 son elementos 3D con longitud egual a cero utilizados para modelar el comportamiento de los aisladores elastoméricos utilizados en aplicaciones de aislamiento sísmico. Los elementos isolator1 tienen propiedades de plasticidad acopladas para las dos direcciones de corte (ejes 2 y 3 en el sistema de coordenadas local del elemento), mientras que se caracterizan por un comportamiento elástico lineal para los cuatro tipos de deformación restantes. El comportamiento en las direcciones de corte se basa en el comportamiento histerético propuesto por Wen [1976] y Park et al. [1986]. En las direcciones de corte, las relaciones de fuerza y deformación siguen las ecuaciones siguientes:

donde η_shear_2 y η_shear_3 son las razones entre la rigidez posterior de fluencia y la rigidez elástica (antes de fluencia) en cada dirección de corte (razones de endurecimiento del elemento), K2 y K3 son las rigideces elásticas del elemento en cada dirección, Y2 y Y3 las deformaciones de fluencia en cada dirección de corte, mientras que z2 y z3 son variables histeréticas internas.
Se necesitan trece parámetros para describir el comportamiento del elemento isolator1:
Rigidez elástica en la dirección axial
(eje local 1) - K_axial
La respuesta elástica lineal del aislador en la dirección axial.
Rigideces elásticas en los grados de libertad de corte - K_shear_1, K_shear_2
Rigideces elásticas en los grados de libertad de torsión y rotación - Ktorsional, Krot1, Krot2
Resistencia característica para cada dirección de corte – fy_shear_1, fy_shear_2
Razón de endurecimiento para cada dirección de corte – η_shear_1, η_shear_2
Variable que controla el Amplitud de la histéresis - A
Primera variable de forma histérica - β
Segunda variable de forma histérica - γ
En la ventana de diálogo de este elemento es posible definir también un valor de amortiguamiento específico del elemento, en contraste con el amortiguamiento global descrito aquí. Para hacerlo, los usuarios deben simplemente hacer clic sobre el botón Amortiguamiento y luego seleccionar el tipo de amortiguamiento que mejor se adapta al elemento en cuestión (por mayores detalles respecto a los tipos de amortiguamiento disponibles y consejos respecto de cuáles pueden ser las mejores opciones, ver el menú Amortiguamiento). Se recuerda a los usuarios que el amortiguamiento definido a nivel de los elementos prevalece por sobre el amortiguamiento global, es decir, los coeficientes de la matriz de amortiguamiento calculados "a nivel global" asociados a los grados de libertad de un elemento dado serán reemplazados por los coeficientes calculados a través del producto de la matriz de masa del elemento y un parámetro proporcional a la masa, o a través del producto de la matriz de rigidez del elemento y un parámetro proporcional a la rigidez, o mediante el cálculo de una matriz de amortiguamiento de Rayleigh del elemento.
Notas
- En general, la regla A / (β + γ) = 1 debe seguirse al definir las variables histéresis del modelo
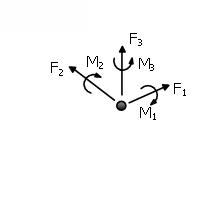
Ejes Locales y Notación del Output