Sistemas de ejes globales y locales
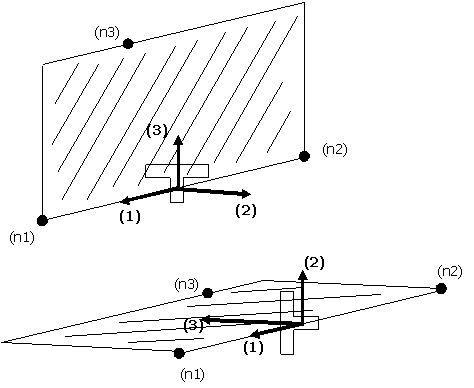
En SeismoStruct, el sistema de referencia global está constituido por una terna de ejes cartesianos x-y-z que se utilizan para definir la longitud (x), profundidad (y) y altura (z) de todos los modelos estructurales. Por otra parte, SeismoStruct requiere también la asignación de un sistema de coordenadas locales 1-2-3 a cada elemento estructural, de forma tal de definir la orientación del elemento en el espacio. Por convención, la dirección local (1) se refiere a la cuerda del elemento, mientras que los ejes (2) y (3) definen el plano de la sección transversal y su orientación. A pesar de no existir limitaciones para la definición de los ejes locales (2) y (3), es habitual que los usuarios asocien el eje (2) a la dirección "débil" del miembro y el eje (3) a la dirección "fuerte", como se ilustra a continuación en referencia a una viga. Esta convención es adoptada en las figuras explicativas utilizadas en la descripción de las secciones en SeismoStruct.
Mientras que la orientación del vector local (1) se encuentra definida sin ambigüedades por la línea que une los dos nodos extremos del elemento (siendo la dirección positiva aquella que va del nodo n1 al nodo n2), es necesario utilizar un "elemento de orientación" para caracterizar por completo la orientación de los ejes locales restantes y, por ende, de la sección transversal. A partir de la versión 6 del software, la orientación del elemento puede realizarse de dos modos distintos:
- mediante la especificación de un ángulo de rotación (opción por defecto), cuyo valor por defecto es 0 (los modelos construidos con el Asistente siguen esta regla), o
- mediante la definición de nodos adicionales, llamados "nodos de orientación". Si el objeto "por defecto" es seleccionado, la orientación del elemento es calculada automáticamente por el programa, de lo contrario dependerá de la posición del nodo seleccionado.
El nodo de orientación permite definir el plano (1-3) sobre el cual yace el vector (3), su dirección (perpendicular al eje (1)) y orientación (apuntando hacia n3), como se muestra abajo. El vector local (2) es luego definido automáticamente mediante el producto vectorial de los vectores (1) y (3), quedando establecida su orientación mediante la "regla de la mano derecha".
La gran mayoría de las estructuras modeladas en SeismoStruct son pórticos planos y poseen elementos verticales (por ej., columnas rectangulares, muros) con secciones transversales simétricas y vigas "T" horizontales que no son simétricas respecto de su eje (2). Por lo tanto, la selección del objeto "por defecto" como el tercer nodo puede resultar muy ventajoso.
Nota: En general, un ángulo de rotación igual a 0 significa que el eje (3) es vertical. Los elementos verticales (en los cuales el eje (1) es vertical) son un caso especial, en los que un ángulo igual a 0 significa que el eje (3) se encuentra orientado según la dirección X.