Amortiguador Viscoso – vsc_dmp
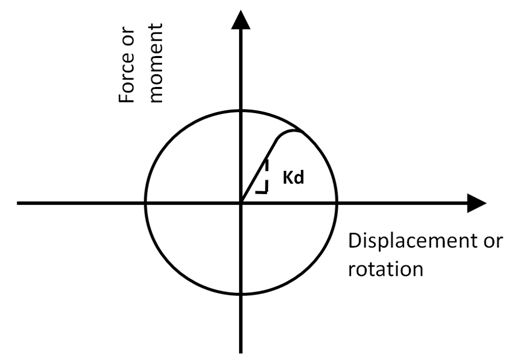
La curva de respuesta del amortiguador viscoso (vsc_dmp) es una curva de respuesta uniaxial que modela el comportamiento de un amortiguador viscoso no lineal. El modelo del Amortiguador Viscoso consiste en un resorte lineal y un disipador conectados en serie y se basa en el modelo del derivado fraccional de Maxwel descrito por Makris y Constantinou [1991]. En total, se deben definir cuatro parámetros para el modelo:
Rigidez Inicial (Kd)
El valor por defecto es 200000 KN/m
Constante de Amortiguamiento
(Cd)
El valor por defecto es 1200 KN/(m/s)α
Exponente de Velocidad (α)
El valor por defecto es 0.4
Tolerancia del Pin (s)
Tolerancia de la conexión del amortiguador. El valor por defecto
es 0mm